项目案例4——汽车非侵入式主动安全系统探究与集合装置
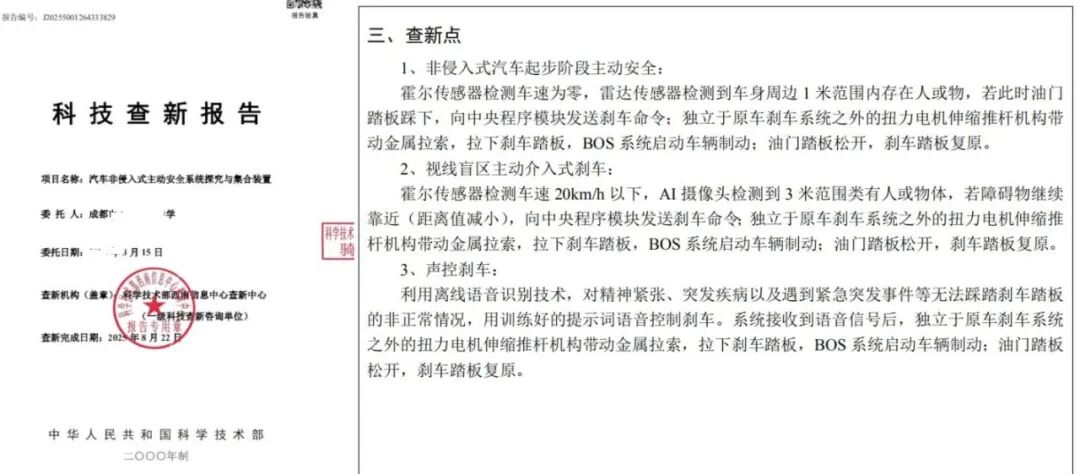
低速、盲区、误操作造成事故占交通事故总数80%以上。现有的主动安全系统配备率极低且存在激活条件、探测范围等方面问题,难以在起步和低速阶段发挥作用。本装置在独立于原车系统之外,使用多传感器探测、识别、计算,利用精简的支架结构和拉伸系统,实现汽车起步非侵入式主动安全、低速盲区主动介入式安全、声控刹车等多安全装置集合。
一、项目背景
1.1 研究背景
机动车盲区事故、低速事故、误操作事故占交通事故总数80%以上。
1.2 事故探究
• 机动车盲区事故:全球每年50万起,盲区相关事故占比30%-40%。我国每年因大车盲区引发交通事故超2万起,大型车辆右转盲区占盲区事故75.6%。 • 低速事故:约75%的事故发生在车辆静止或低速状态下,75%的追尾发生在30km/h以下。 • 误操作事故:误踩加速踏板占交通事故12.6%,2019年造成63093人死亡。
1.3 现状综述
现有主动安全系统(AEB、ABS、ESP等)存在以下问题:
• 激活条件限制,难以在起步和低速阶段发挥作用 • 探测范围有限,对低矮物体识别不足 • 配备率低,我国70%车辆未配备AEB • 成本高昂
二、设计思路和方案
2.1 思路及关键问题
1. 如何准确识别起步和低速阶段的危险情景 2. 如何在不改动原车安全结构的前提下实现主动安全 3. 如何设计结构精简、便于后期加装的装置
2.2 解决问题
• 危险识别:使用OpenMV AI视觉摄像头实现精准识别和跟踪 • 非侵入设计:采用小巧金属支架固定于原车螺栓,不改动线路 • 结构精简:模块化设计,便于安装和维护
2.3 设计方案
1. 多传感器探测:超声波雷达+AI视觉 2. 智能判断:中央处理器实时分析 3. 主动介入:自动/声控刹车 4. 隐蔽安装:不改动原车
三、创新过程

(装置制作安装)
3.1 主控机构及设定
使用EV3主控模块负责接收传感器信号、程序执行、电机执行。
3.2 电机及推杆(计算分析)
《机动车运行安全技术条件》(GB7528)要求:行车制动踏板力不应大于500N。
推力 = 电机转矩 × 减速比 × 5.338 ÷ 丝杠导程 = 533N ≥ 500N(国标要求)✅
3.3 刹车踏板拉伸执行机构
采用小巧金属支架固定于刹车踏板原车螺栓支点,在足够扭力电机带动下用金属拉索的方式对刹车踏板进行控制。
3.4 程序逻辑
通过可编程模块实现对危险情景的智能判断和刹车踏板的自动控制。
四、集合装置成品

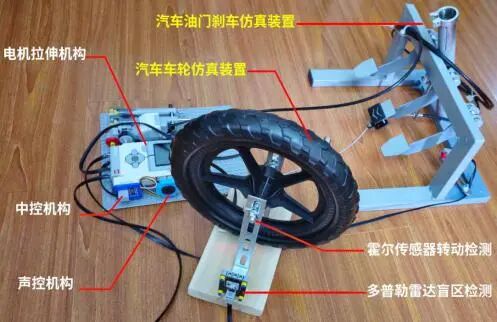
4.1 仿真演示装置
使用EV3套件搭建的仿真演示装置,用于验证程序逻辑和机械结构可行性。
4.2 上车装置成品
完成实车安装调试,在实际车辆上进行功能测试验证。
五、装置制作与上车安装调试
5.1 材料选择
选用EV3套件、Arduino、OpenMV等模块化组件。
5.2 制作与安装过程
完成装置制作、程序调试和实车安装。
5.3 主要问题
解决传感器精度、响应时间等技术难点。
5.4 实车功能测试
• ✅ 起步安全测试 • ✅ 盲区介入测试 • ✅ 声控刹车测试 • ✅ 误踩油门测试
六、总结与改进
6.1 总结
本装置实现多安全装置集合,具有非侵入式设计、结构精简、隐蔽运行特点。
6.2 创新点
WECHATIMGPH_6
• 多安全装置集合(起步+盲区+声控+误踩油门) • 非侵入式设计,不影响原车安全系统 • AI视觉识别,精准可靠 • 隐蔽运行,零附加隐患
6.3 下一步改进
优化算法性能,增加更多安全场景支持。
作者:李其知\ 指导单位:四川笑蓉科技
🦀 成都笑蓉科技
本文由笑蓉科技供稿 由🦀笑蓉科技小助理🦀笑哈哈小螃蟹编辑发布